Gexcel is an Italian company providing innovative software and instruments for the 3D geospatial and surveying/mapping market. The first product, successfully commercialized since 2001, is Reconstructor®, a powerful post-processing software for point clouds. In 2016 Gexcel launched HERON® (designed in collaboration with the European Commission Joint Research Centre), one of the most advanced SLAM-based wearable mobile mapping system on the market: born for nuclear plants monitoring, it’s now appreciated in mining, construction, and geospatial projects. In 2017 Gexcel presented OPMMS® (Open Pit Mine Monitoring System) based on the automatic survey and combined with long-range LiDAR scanners.

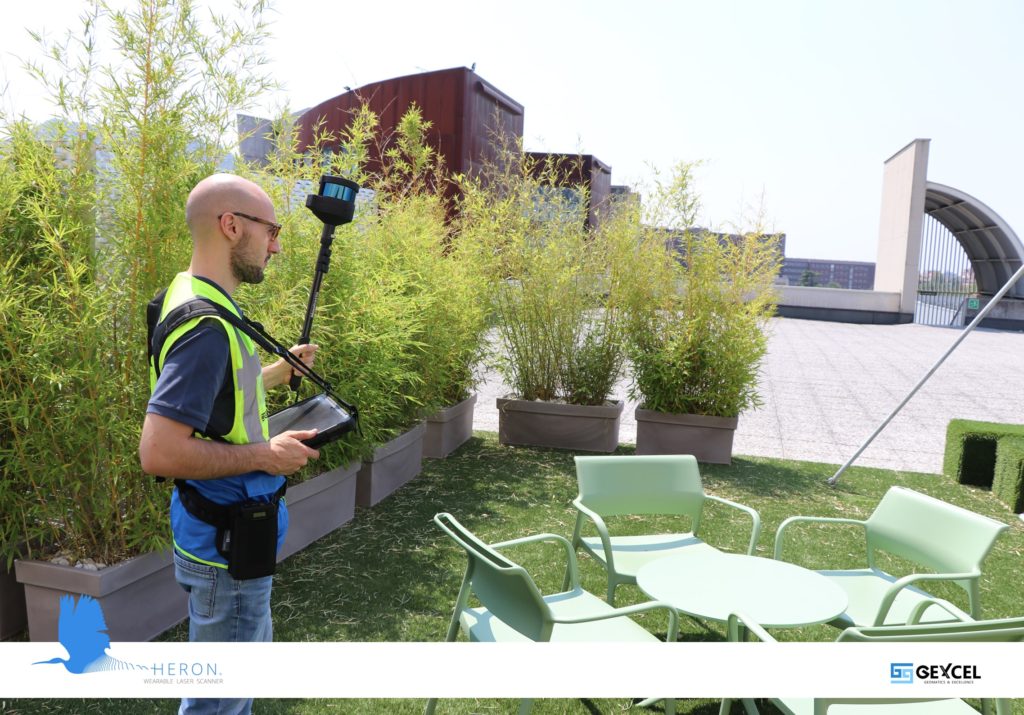
HERON® is a SLAM-based scanner for fast mobile mapping activity indoors and outdoors. Versatile and extremely performing also when GNSS signal cannot be easily tracked, HERON® works properly in every light conditions.
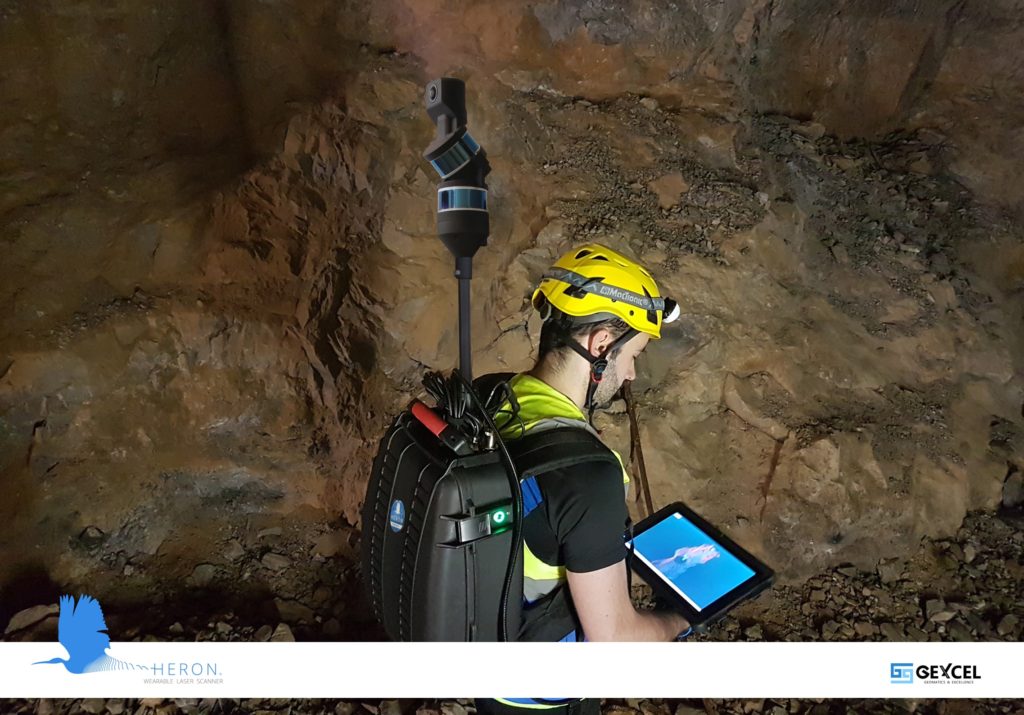
HERON® features single or double laser sensor and a 5K pano camera, and is perfect everywhere, but especially in underground mines, geospatial applications, multi-level buildings, tunnels, cultural heritage sites, forensic procedures, forests, urban areas.
Particularly appreciated for harsh and complex areas. The collecting data can be used for several applications: volume computation, excavation progress monitoring, digital archive, construction progress monitoring, floor plans generation for asset management, logistic/traffic management, dilapidation monitoring, scan-to-BIM, contours and profiles, 3D virtual experience, real-time change detection, as-built generation, and much more.
HERON® is equipped with various professional software that covers all the processing steps. The user doesn’t need any other software to manage the entire data processing workflow, from the import to the first deliverables. Then is free to go to third-party software in a very easy way: OrbitGT, AutoCAD™, ReCap™, EdgeWise, Verity are fully supported. The HERON® post-processing software is characterized by unmatched patented algorithms that dramatically reduce the drift effects, typical of the SLAM process, and allow to use of static scans as constraints.

In details:
– HERON® Desktop is the platform that runs the SLAM process and manages the drift effects reduction patented algorithms. It can split and merge trajectories and point clouds, remove noise and mobile objects. A full-automatic processing approach is provided, but a unique advanced mode, if all the SLAM parameters can be set, is available.
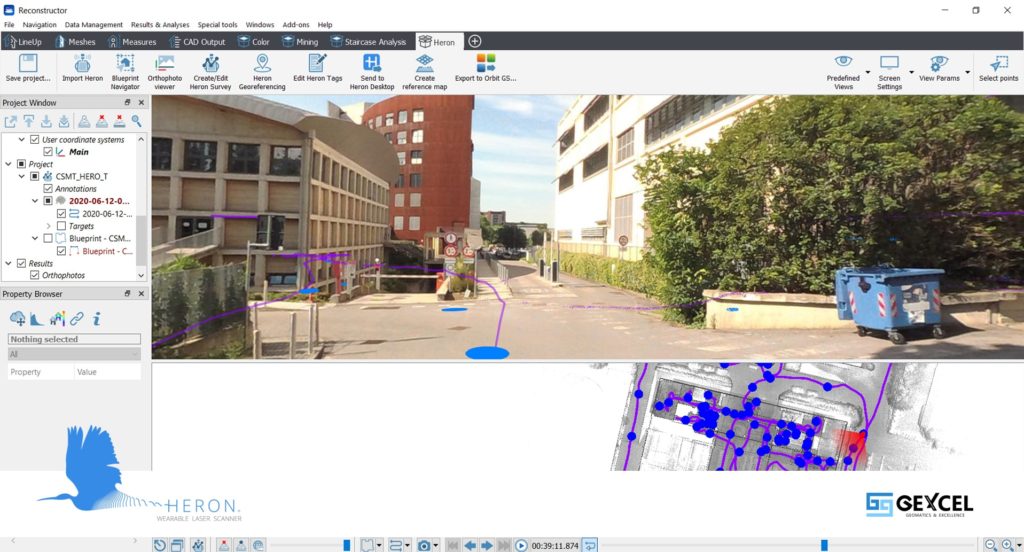
– Reconstructor® is a worldwide well-known software package to manage point clouds and lidar data. In Reconstructor® an automatic scans registration powerful algorithm helps to register scans from tripod, mobile, and indoor mobile scanners. All the main point clouds data and project formats are supported: colorized .fls, .zfs, .rxp, .3dd, .x3s, .x3m, .clr, .cl3, .dp, .ixf, .nctri; but also .ifc BIM and various 3D mesh open formats and project formats, like the FARO Scene one. The software supports point clouds filtering, managing and classifying, and allows to export the results in the more common platforms as ReCap™. In Reconstructor® it is also possible to extract cross-sections and profiles and get orthophotos/x-ray orthophotos with direct export to AutoCAD™. Volumes and areas computation, mesh creation and manipulation, and more specific verification tools are available. A powerful tool to compare point clouds and BIM models is also included.
– GoBlueprint® is a free tool, running also on tablets and low-performance PCs, designed to visualize and measure HERON® 2.5D maps and orthophotos created in Reconstructor®. Also, linear, angular, area measurements and volume computation can be easily obtained. GoBlueprint® is the perfect solution for final clients not skilled on advanced CAD tools who want to extract information from the 3D surveys. Moreover, GoBlueprint® works out the need to share the results of the 3D mapping with a large number of users and final clients.
The system detects at a walking pace, but the surface covered in an hour is highly variable depending on the size of rooms and logistics. We can estimate that in complex buildings characterized by corridors and 20-30 sqm rooms, like hospitals or offices, it is possible to map 3.000 sqm/h. In larger sites, like sports halls, conference rooms, malls, convention centers, it is possible to cover 6.000-9.000 sqm/h.
HERON® MS Twin collects around 450 MB/minute which include both 3D point clouds (from double laser sensor) and 5K panoramic images automatically taken by the system. Considering 7 hours of mostly continuous acquisition, HERON® MS Twin can approximately collect 185 GB of data.

HERON® LITE features only one sensor and collects about 60 MB/minute, so around 25 GB in 7 hours in continuous acquisition. The configuration with 5k panoramic camera (HERON® LITE Color) adds also the images and the final data dimension depends on the number of photos that the user shoots (each one is 5 MB).
HERON® exports .e57, .las, .ply formats, and the data can be also directly imported into ReCap™ (.rcp format). The .e57 format, which includes color and bubble view, can be also imported in FARO WebShare Cloud.
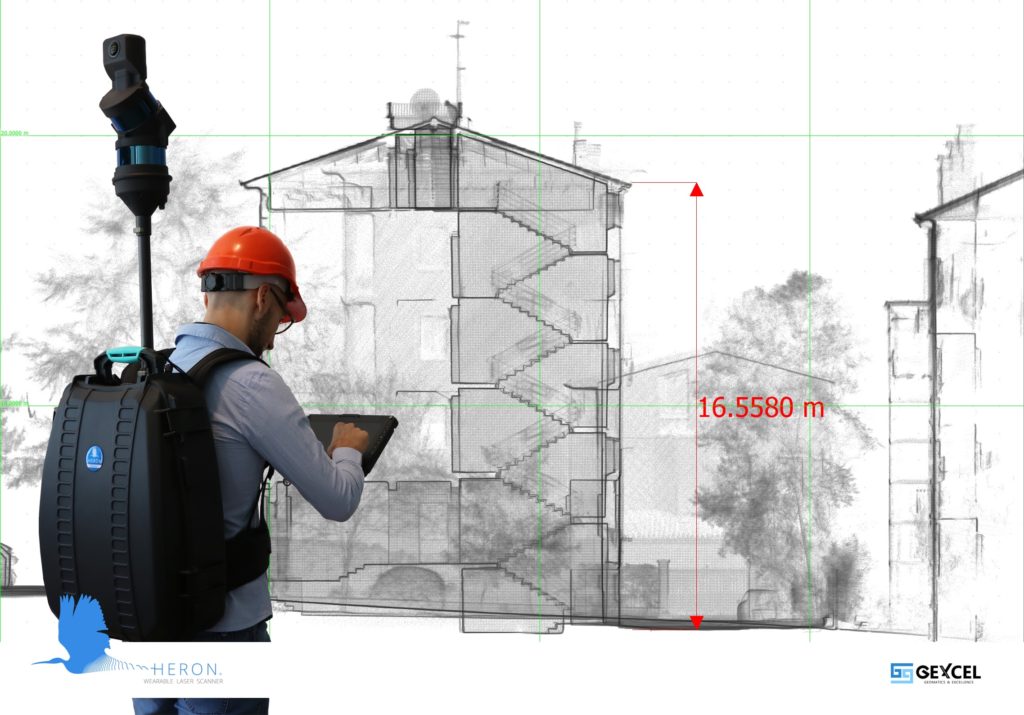
As mentioned before, the point cloud can be directly imported into ReCap™ and then to every Autodesk CAD platform (AutoCAD™, Revit, etc.). Thanks to the export in other open formats, HERON® point clouds are digested by most of the CAD systems. The Reconstructor® process can also produce a blueprint directly exportable to AutoCAD™ as a scaled raster.
HERON® LITE Color and HERON® MS Twin feature a 5K panoramic camera. This is a real add-value for the final survey as the user can access some interesting application fields, like the facility management of huge areas, with a very little effort, speeding up the objects identification process: in fact, when you integrate 3D and imagery data, you can easily recognize objects difficult to visualize on the point cloud.

By directly comparing static laser scanners with HERON® data in local areas, the geometrical differences (registration accuracy) are in a maximum range of 2 cm, and the global accuracy in large/long acquisitions is around 5 cm. But the latest HERON® advanced filtering tools provide an extremely clear scan where the objects are very well-defined so that scan-to-BIM projects can be supported.
Moreover, HERON® can use static scans as constraints in the SLAM processing, so to keep the typical drifts of the SLAM algorithm under control. In this way, it is also possible to easily combine and manage together large surveys at different resolutions.
As mentioned above, thanks to a powerful algorithm, HERON® is able to generate point clouds adaptable to any other geo-referenced point cloud of the same area previously surveyed (with UAV, mobile mapping systems, or terrestrial laser scanners). So the user obtains a model perfectly constrained to the existing geometry. In this way, Gexcel introduces the concept of “Control Scans”, instead of the most common “Control Points”, into the SLAM algorithm.
Moreover, by using Reconstructor® the user can always integrate static scans with the mobile ones, for instance when he needs to get more detailed information of a specific area of its global survey, or fuse together different sensors (mobile on vehicles, UAV, handheld), enormously speeding up the acquisition of large areas!
Click here to learn more about Gexcel.